在 IEEE 期間的 國際機器人與自動化會議(ICRA)上,于 5 月 13 日至 17 日在日本橫濱舉行,幾何織物將是討論的熱門話題之一。該主題是委員會成員提交的七篇論文之一,由 NVIDIA 機器人研究實驗室 及其合作者共同完成,并將在本周的 ICRA 上亮相。
什么是幾何織物?
在機器人領域,經過訓練的策略本質上是近似的。他們通常會做正確的事情,但有時,他們移動機器人太快,與物體碰撞,或將機器人甩來甩去。無法保證會發生什么。
因此,每當有人在物理機器人上部署經過訓練的策略,特別是強化學習訓練的策略時,他們都會使用一層低級控制器來攔截策略中的命令。然后,他們轉換這些命令,以滿足硬件的限制。
當您在培訓 RL 策略時,請在培訓期間使用策略運行這些控制器。研究人員確定,他們的 GPU 加速 RL 訓練工具可以提供的一個獨特價值是對這些控制器進行矢量化,使其在訓練和部署期間都可用。這就是這項研究的作用。
例如,研究人形機器人的公司可能會展示帶有低級控制器的演示,這些控制器可以平衡機器人,但也可以防止機器人將手臂伸進自己的身體。
研究人員選擇矢量化的控制器來自過去的幾何織物工作。特別是,本文:幾何織物:推廣經典力學以捕捉行為物理學,在去年的 ICRA 上獲得了最佳論文獎。
DeXtreme 政策?
研究人員在今年的論文中提到的手頭操作任務也來自于著名的研究領域 DeXtreme。
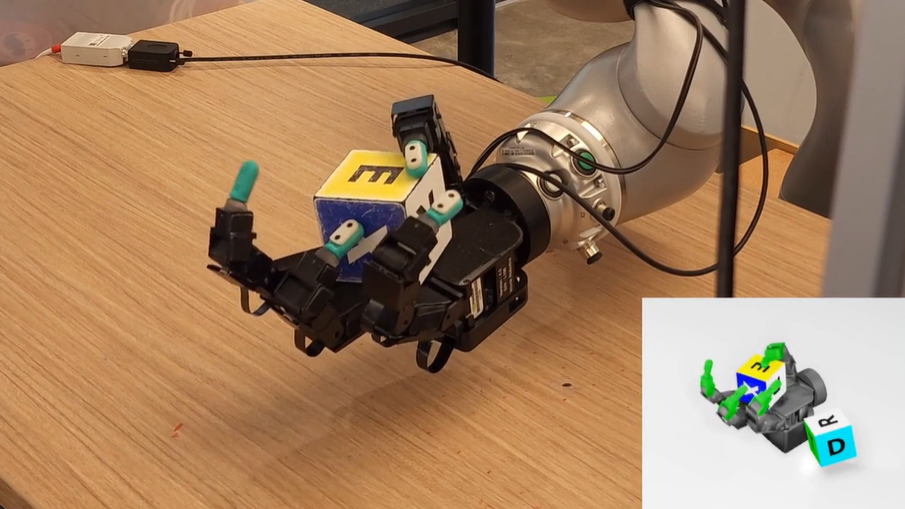
在這項新工作中,研究人員將這兩條研究線合并,在矢量化幾何結構控制器的基礎上訓練 DeXtreme 策略。這使機器人更安全,通過名義的織物行為指導策略學習,并使模擬訓練和部署系統化,從而離在生產環境中使用 RL 工具又近了一步。
這創建了一個基礎設施,使研究人員能夠在訓練過程中快速迭代,以獲得正確的領域隨機化,從而成功地進行 sim2real 部署。例如,通過在訓練和部署之間快速迭代,他們可以調整織物結構,并在訓練期間添加大量的隨機擾動力,以實現遠優于先前工作的魯棒性水平。
在之前的 DeXtreme 工作中,現實世界的實驗證明對物理機器人來說非常困難,在實驗過程中會磨損電機和傳感器,并改變底層控制的行為。有一次,機器人壞了,開始抽煙!
但有了幾何結構控制器作為政策的基礎并保護機器人,研究人員發現,他們在部署和測試政策時可以更加自由,而不用擔心機器人會自我毀滅。
欲了解更多信息,請參閱 幾何結構:政策學習的安全指導媒介 或者觀看 DeXtreme 示例視頻。
ICRA 的更多機器人研究?
今年提交的其他值得注意的文件包括:
- SynH2R
- 看不見,心里還在
- 點云世界模型
- SKT Hang
SynH2R
該 SynH2R 框架由作者提出品適合訓練機器人的真實人類抓握運動生成方法。欲了解更多信息,請參閱 SynH2R:用于學習人機切換的手部對象運動的合成。
看不見,心仍在?
該 RDMemory 作者對機械臂進行了測試,以觀察它在看到但后來被遮擋的對象上的反應,從而確保其在多種環境中都能可靠地做出反應。這項工作是在模擬和真實世界的實驗中完成的。
欲了解更多信息,請參閱 看不見,心仍在:使用視頻跟蹤記憶模型對未觀測到的物體進行推理和規劃 或者觀看 RDMemory 示例視頻。
點云世界模型?
在這個 點云世界模型 中,研究人員建立了一種新的點云世界模型(PCWM)和基于點云的控制策略,這些策略被證明可以提高機器人學習器的性能、減少學習時間和提高魯棒性。
欲了解更多信息,請參閱 點云模型提高機器人學習者的視覺魯棒性 相關論文。
SKT-Hang
作者在 SKT-Hang 中研究了機器人如何將各種物體掛在不同的支撐結構上的問題(圖 1)。盡管這似乎是一個容易解決的問題,但物體形狀和支撐結構的變化卻給機器人帶來了多項挑戰。

有關更多信息,請參閱 SKT-Hang:通過對象不可知語義關鍵點軌跡生成懸掛日常對象 和 GitHub /HCIS-Lab/SKT-Hang。
具有手術精度的機器人?
幾篇新的研究論文已應用于醫院手術環境。
ORBIT 外科?
ORBIT-Surgical 是一個基于物理的手術機器人模擬框架,基于 NVIDIA Isaac Sim 平臺上的 NVIDIA Omniverse 實現。
它利用 GPU 并行化來訓練強化學習和模仿學習算法,這些算法有助于機器人學習的研究,以增強人類的手術技能。此外,它還支持生成現實的 合成數據,用于主動感知任務。研究人員成功地演示了使用 ORBIT Surgical sim 將學習到的策略真正轉移到物理 dVRK 機器人上。
ORBIT Surgical 的底層機器人模擬應用程序將在發布后以免費開源包的形式發布。
欲了解更多信息,請參閱 ORBIT Surgical:一個用于學習外科增強靈活性的開放模擬框架。
DefGoalNet
這個 DefGoalNet 論文的重點是形狀伺服,即一項專門用于控制對象以創建特定目標形狀的機器人任務。有關更多信息,請參閱 DefGoalNet:從可變形對象操作的演示中學習上下文目標。
在 ICRA 與 NVIDIA Robotics 合作伙伴會面
NVIDIA 機器人合作伙伴正在 ICRA 展示他們的最新進展。
蘇黎世的 ANYbotics 介紹了其 ANYmal Research 項目,該項目提供了一個完整的軟件包,允許用戶訪問 ROS 系統的低級控制。ANYmal Research 是一個由數百名研究人員組成的社區,他們來自頂尖的機器人研究中心,包括人工智能研究所、蘇黎世聯邦理工學院和牛津大學。(IC010 展位)
總部位于慕尼黑的 弗蘭卡機器人 重點介紹其與 NVIDIA Isaac 操縱器 一起的合作,展示基于 NVIDIA Jetson 的人工智能動力機器人控制伴侶,以及用于 Matlab 的 Franka 工具箱。(IC050 展位)
在(IC053 展位),Enchanted Tools?展示了其 Jetson 動力的 Miroka? 機器人。

了解更多信息
這個 NVIDIA 機器人研究實驗室 是一家總部位于西雅圖的卓越中心,專注于機器人操作、感知和基于物理的模擬。它是 NVIDIA 研究 的一部分,在全球擁有 300 多名頂尖研究人員,專注于人工智能、計算機圖形學、計算機視覺和自動駕駛汽車等領域。
?