傳感器模擬是解決自動駕駛汽車(AV)開發中現實世界數據差距的關鍵工具。然而,只有傳感器模型準確地反映了物理世界,它才有效。
傳感器可以是被動的,比如相機,也可以是主動的,發出電磁波(激光雷達、雷達)或聲波(超聲波)來產生傳感器輸出。在模擬中建模時,每個模態都必須根據其真實世界中的對應模態進行驗證。
在之前的文章中,我們詳細介紹了如何使用 NVIDIA DRIVE Sim 驗證相機和激光雷達模型,具體可以參見 Validating NVIDIA DRIVE Sim Camera Models 和 Validating NVIDIA DRIVE Sim Lidar Models。本文將涵蓋雷達,這是一種用于探測和躲避障礙物的重要傳感器。
雷達驗證有多種方法。例如,您可以比較在真實世界數據上訓練的 AV 堆棧在遇到合成雷達數據時的行為。或者,你可以將合成雷達數據與現實世界實驗中的物理數據進行比較。
使用 AV 堆棧驗證模型僅在觸發 AV 功能的程度上評估其能力,該功能測試保真度下限。因此,我們將重點關注第二種方法。
雷達傳感器管線
雷達傳感器發射的無線電波從場景中的物體反射并返回傳感器。然后,接收到的信號經過多個處理階段,這些處理階段識別來自真實物體的回波并過濾噪聲。然后,這些返回將顯示為環境的點云。
這種后處理方法通常是傳感器制造商知識產權的一部分,因此 NVIDIA DRIVE Sim 傳感器模型旨在近似它們。DRIVE-Sim 生態系統中的傳感器供應商可以包括其整個管道的精確實現,包括后處理。
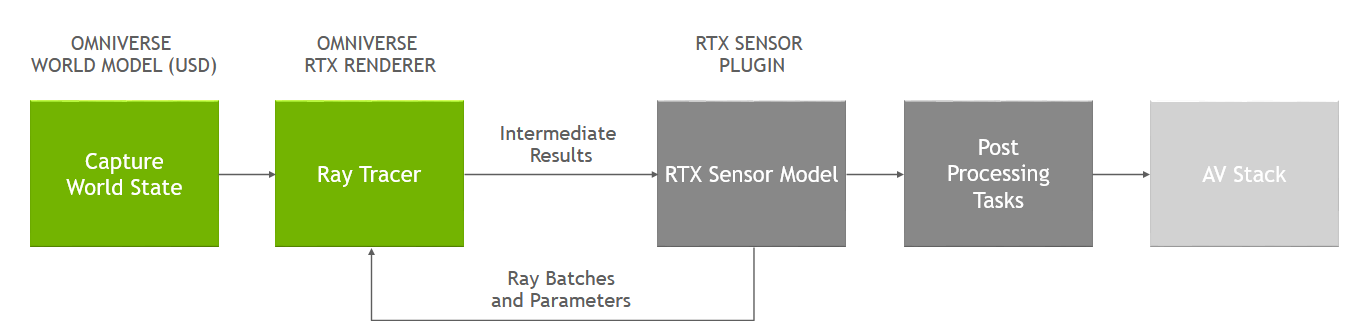
DRIVE Sim 使用光線跟蹤對活動傳感器進行建模。嵌入雷達輻射模式的射線被發射到場景中。對于 3D 場景中擊中對象的每條光線,都會根據擊中材質的波長相關特性創建用于反射和透射的二次光線。DRIVE-Sim 中的材料使用雙向散射分布函數(BSDF)。這樣可以模擬多路徑效應。
DRIVE Sim 光線跟蹤具有時間意識。每條光線都有自己的時間戳,并看到不同的環境和傳感器位置來匹配該時間。這使得能夠模擬基于時間的效果,例如滾動快門和多普勒。
對于雷達,在滿足射線跟蹤的停止標準后,傳感器模型對返回進行合并和處理。我們的雷達模型考慮了傳感器的視場(FOV)、天線方向性、分辨率、模糊度和雷達的靈敏度模式。使用恒定假 al Arm 率(CFAR)算法來提取模擬噪聲基線上的有效檢測。然后,使用作為真實傳感器的精確通信協議對檢測進行編碼,以服務于環路中的硬件用例。
雷達驗證
為了驗證 DRIVE-Sim 雷達模型,我們基于真實雷達的技術產品規范(TPS)設計了三個場景。目標是測試雷達傳感器性能的各個組成部分,包括其對 FOV 的檢測能力、分離能力和動態條件下的精度。然后,我們在 數字孿生 環境中,通過 DRIVE-Sim 收集等效數據進行詳細分析。
數據采集環境
對于數據收集環境,我們選擇了一個開放寬敞的區域——加利福尼亞州的交通研究中心。在這種環境下,我們可以最大限度地減少噪音和不必要的反射,以簡化 DRIVE-Sim 中的數字孿生結構。

車輛設置
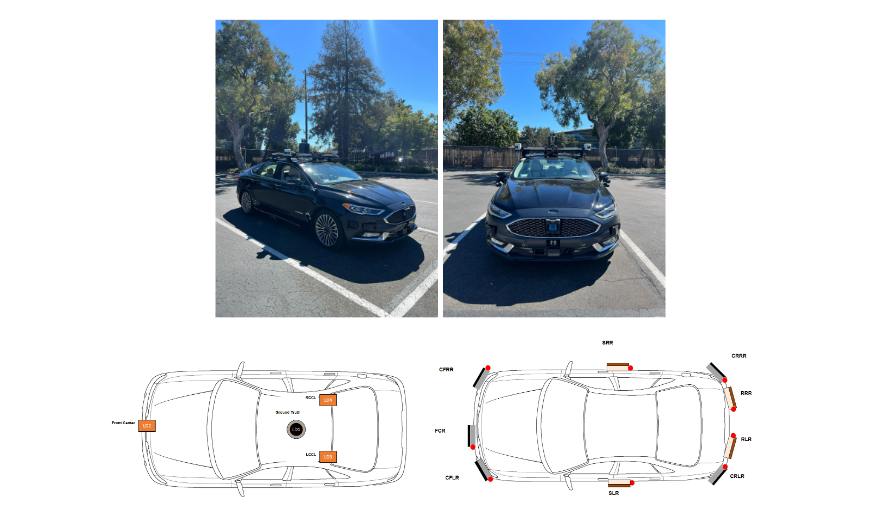
我們在 NVIDIA DRIVE Hyperion AV 參考架構中,使得基于 NVIDIA DRIVE 的開發人員可以輕松地在模擬和現實世界之間轉換。傳感器被安裝在開發車輛上(圖 3)。在這種情況下,前中心雷達(FCR)是評估的重點。
測試中的雷達工作頻率為 77GHz,包括兩次掃描:一次是近距離掃描,視野較寬但范圍有限,另一次是遠距離掃描,范圍較寬但視野較窄。此外,一個 360°旋轉激光雷達傳感器(LD1)安裝在汽車頂部,以提供偽地面實況數據。
模型驗證過程
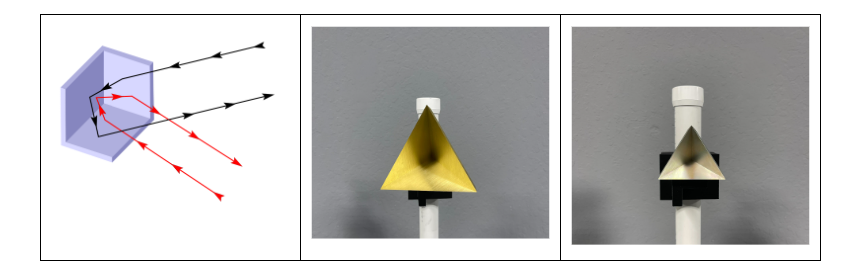
我們三個驗證實驗的核心是兩個三面體角反射器。這些是標準的雷達目標,將能量反射回入射方向。它們的特征是雷達截面積(RCS)值,這是衡量物體將雷達能量反射回接收器的能力。
我們使用了一個“高”RCS 為 15.71 分貝(相對于一平方米(dBsm))的模型,另一個“低”RCS 為 4.79 dBsm,以表征模型在寬 RCS 范圍內的行為。
激光雷達的偽地面實況測量用于在 DRIVE Sim 中虛擬復制測試設置,并進行精確的材料分配。
在收集了虛擬數據后,我們將雷達模型輸出與真實雷達進行了比較。以下是三種情況的比較結果。
場景 1:使用角反射器進行 FOV 采樣
在第一種情況下,我們評估了雷達在視場內的探測能力,并驗證了其距離和方位精度。
我們在雷達視場內的多個網格位置放置了一個角反射器,如圖 5 所示。我們假設傳感器的行為是對稱的,因此我們只對 FOV 的一半進行采樣以增加采樣密度。
我們總共記錄了 579 個高 RCS 角反射器位置和 632 個低 RCS 角反射器的位置。
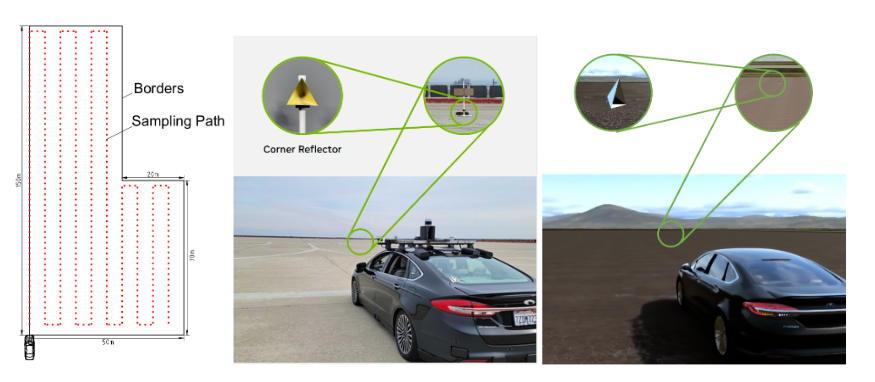
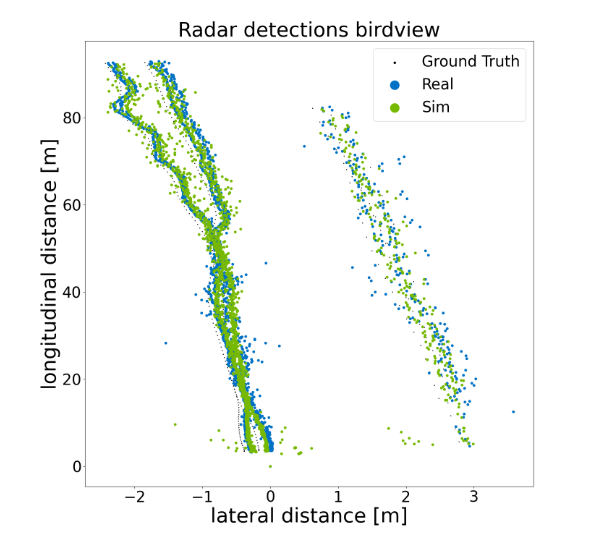
圖 6 描繪了所有 1211 個高和低 RCS 角反射器位置的真實和模擬雷達探測的自上而下視圖。我們將此作為連貫性檢查開始。盡管我們觀察到 80 米以上 FOV 覆蓋范圍的差異,但總體覆蓋范圍呈現出明顯的相似性,足以進行交叉檢查。
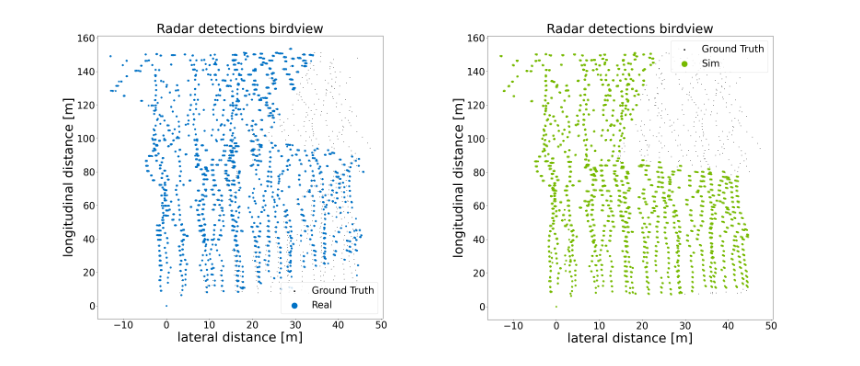
圖 7 中的直方圖顯示了高和低 RCS 角反射器的距離、方位角和 RCS 相對于地面實況的誤差分布。在適用的情況下,我們通過對數據擬合高斯分布來量化結果。真實雷達的結果顯示在左側,DRIVE Sim 數據顯示在右側。
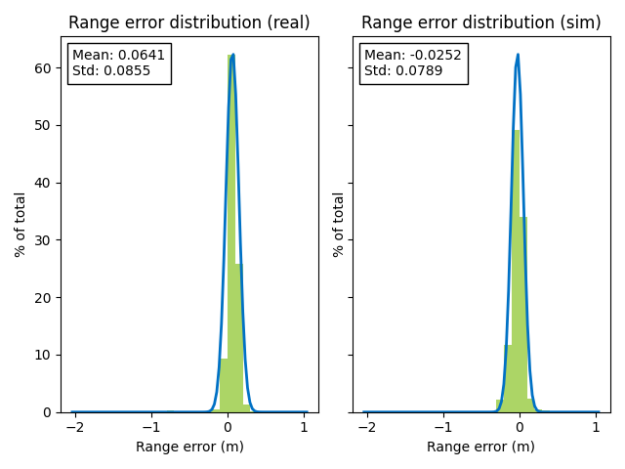
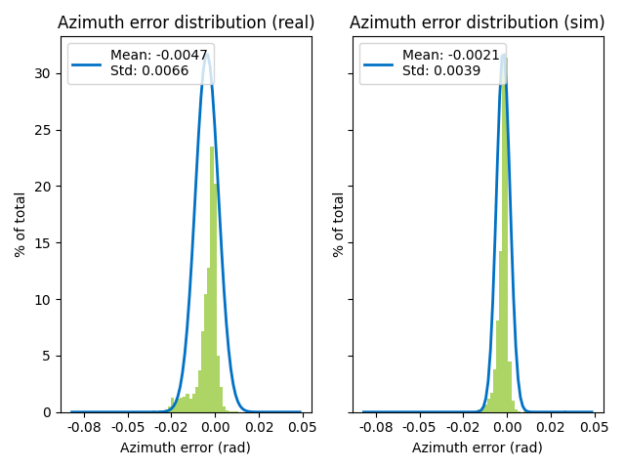
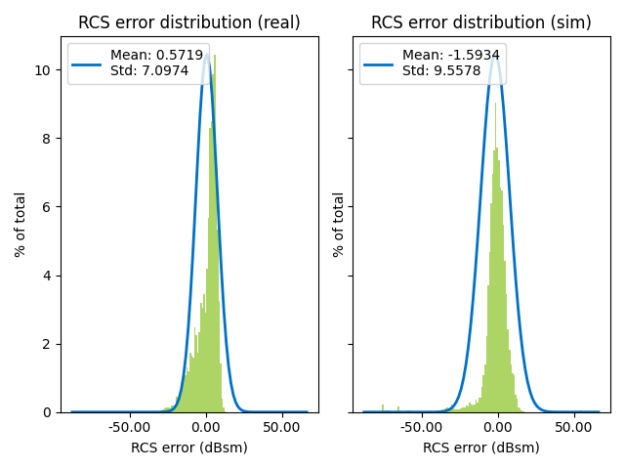
我們觀察到,在雷達視場的不同位置上,真實數據和模擬數據之間存在高度一致性,平均值和標準偏差共享相同的數量級。
這些差異主要歸因于基本事實的不確定性。雖然激光雷達傳感器具有毫米級的精度,但識別物體的位置和方向(如安裝在桿上的角反射器)可能會在厘米范圍內產生誤差。此外,雖然我們在數據收集之前校準了傳感器位置,但可能仍然存在輕微的錯位。
總體而言,在 RCS 值、探測模式和各種探測特性的精度方面觀察到的一致性驗證了雷達的保真度、波傳播和材料建模。
場景 2:角反射器分離能力測試
在道路物體相互靠近的情況下(例如,橋下靜止的車輛、車輛或護欄旁的行人或摩托車手,或兩輛停得很近的汽車),雷達在區分單個物體時可能會遇到困難。因此,準確模擬這種特性至關重要,即分離能力.
我們通過將兩個角反射器放置在彼此非常接近的位置來評估這種能力。數據是在距離傳感器四個不同距離處采樣的。對于每個距離,角反射器的位置如圖 8 所示。
我們根據雷達相應的視場選擇了不同的位置進行近距離和遠距離掃描,以分析其距離和方位分離能力。
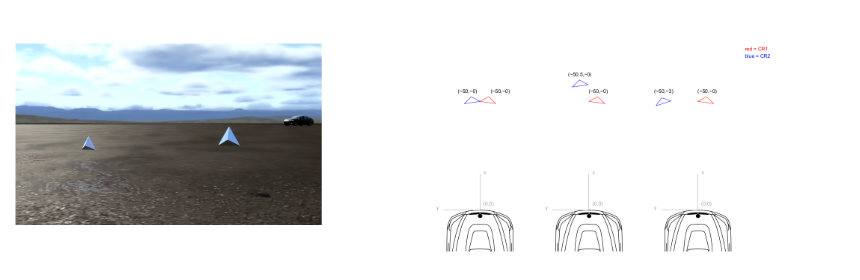
表 1 和表 2 總結了近距離和遠距離掃描的結果。左列表示 CR 接近的位置,我們預計每個 TPS 檢測一次。中心列和右列表示每個 TPS 預計兩次檢測的位置。每個單元詳細說明 CR 的確切位置,以及為模擬和現實世界觀察到的檢測次數。百分比表示在所有考慮的掃描中符合我們預期的檢測比例。當模擬百分比和實際百分比相差不到 20%時,我們定義成功。
| ? | CR(x,y)的位置(以米為單位) | CR(x,y)的位置(以米為單位) | CR(x,y)的位置(以米為單位) |
| 0°和 50 米 | CR1(50,0),CR2=CR1 真實:一次檢測(100%) Sim:一次檢測(100%) |
CR1(50,0),CR2(50.5,0) 真實:兩次檢測(10%) Sim:兩次檢測(0%) |
CR1(50,0),CR2(50,-3) 真實:兩次檢測(0%) Sim:兩次檢測(0%) |
| -45°和 20m | CR1(14.14,-14.14),CR2=CR1 真實:一次檢測(100%) Sim:一次檢測(100%) |
CR1(14.14,-14.14),CR2(15.14,-14.14.4) 真實:兩次檢測(100%) Sim:兩次檢測(100%) |
CR1(14.14,-14.14),CR2(16.44,-11.84) 真實:兩次檢測(100%) Sim:兩次檢測(100%) |
| -45°和 50 米 | CR1(35.36,-35.36),CR2=CR1 真實:一次檢測(100%) Sim:一次檢測(100%) |
CR1(35.36,-35.36),CR2(36.36,-35.36) 真實:兩次檢測(5%) Sim:兩次檢測(100%) |
CR1(35.36,-35.36),CR2(41,-29) 真實:兩次檢測(80%) Sim:兩次檢測(100%) |
0°和 50 米以及-45°和 20 米的所有位置的結果表明,真實位置和模擬位置之間具有高度相似性。我們在 0°和 50 米處觀察到輕微差異,其中 CR2(50.5,0)。在這種情況下,真實的雷達返回了兩次探測,而不是 10%的掃描中返回一次。
在-45°和 50 米處進行的比較基本一致,除了 CR2(36.36,-35.36),模擬雷達返回了兩次探測。
| ? | CR(x,y)的位置(以米為單位) | CR(x,y)的位置(以米為單位) | CR(x,y)的位置(以米為單位) |
| 0°和 50 米 | CR1(50,0),CR2=CR1 真實:一次檢測(100%) Sim:一檢測(95%) |
CR1(50,0),CR2(50.5,0) 真實:一檢測(100%) Sim:一檢測(5%) |
CR1(50,0),CR2(50,-3) 真實:兩次檢測(0%) Sim:兩次檢測(5%) |
| 0°和 100 米 | CR1(100,0),CR2=CR1 真實:一檢測(100%) Sim:一檢測(60%) |
CR1(100,0),CR2(104,0) 真實:兩次檢測(100%) Sim:兩次檢測(95%) |
CR1(100,0),CR2(100,-6) 真實:兩次檢測(0%) Sim:兩次檢測(0%) |
如表 2 所示,模擬傳感器和真實世界傳感器的結果在很大程度上是相關的。CR2(50.5,0)處 0°和 50m 處出現顯著偏差。此外,對于 0°和 100 米,其中 CR1=CR2,模擬雷達在 40%的掃描中返回兩次探測,而現實世界從未返回兩次檢測。
在對偏差進行進一步分析后,我們將其歸因于技術產品規范僅從幾個角度描述了雷達的分離能力。這使得我們很難估計距離和方位倉的確切布局。
此外,我們對 CFAR 閾值算法的參數化和實現是一種估計,因為它是供應商的知識產權。雷達的分離能力預計對 CFAR 行為相當敏感。
總的來說,在近距離和遠距離掃描中,我們發現模擬的分離能力與真實傳感器足夠接近。
場景 3:以恒定速度駛向拐角反射器
多普勒測量使雷達能夠準確地檢測移動目標的速度。我們評估了模型在動態條件下的性能,測試車輛直接朝著高和低 RCS 角反射器行駛,分別以 10 公里/小時、40 公里/小時和 80 公里/小時的恒定速度行駛,如下所示。

圖 11 中的直方圖顯示了高和低 RCS 角反射器的多普勒誤差結果。
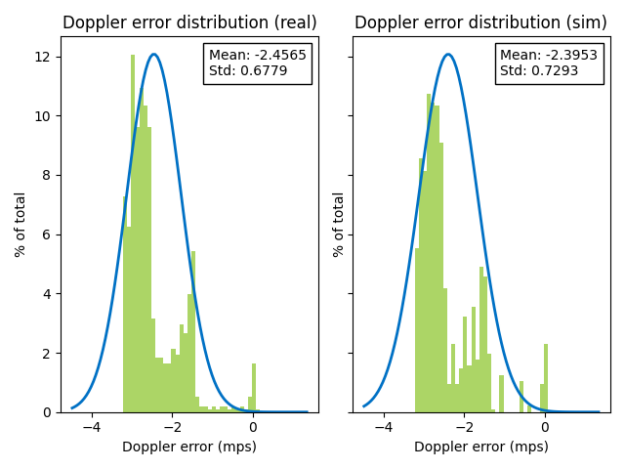
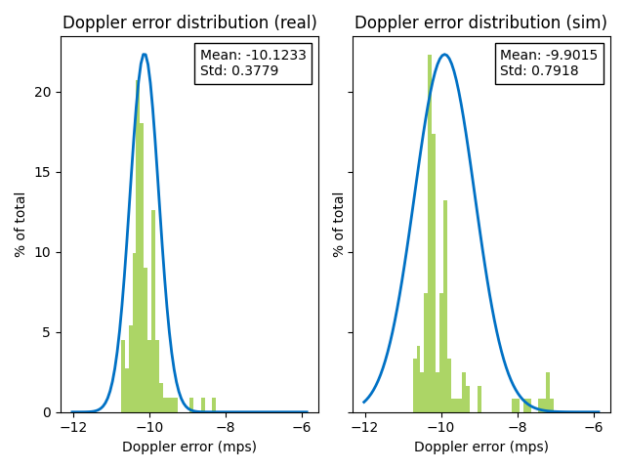
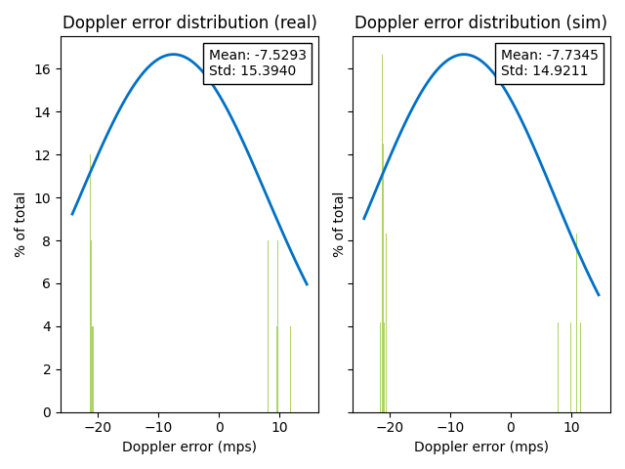
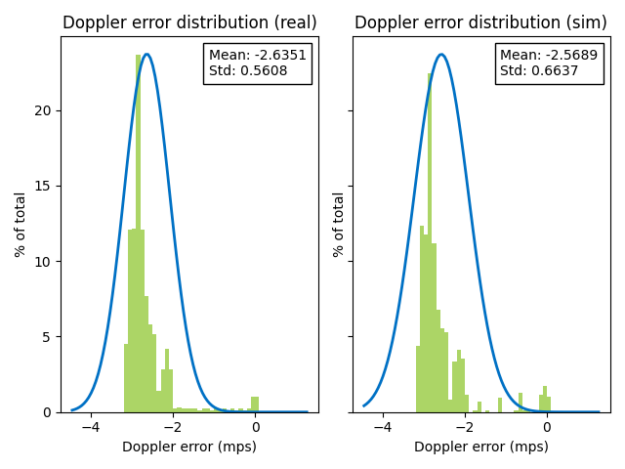
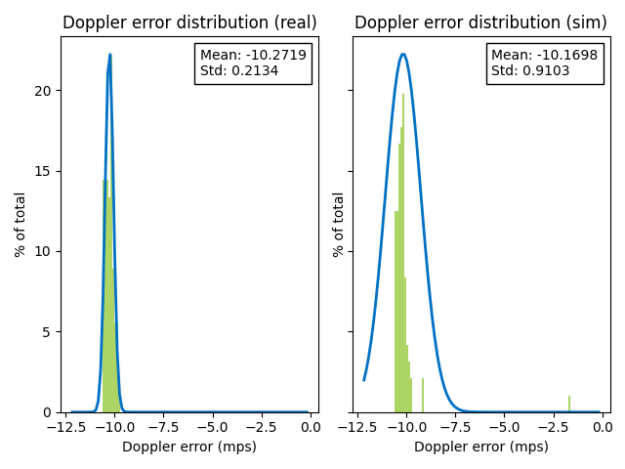
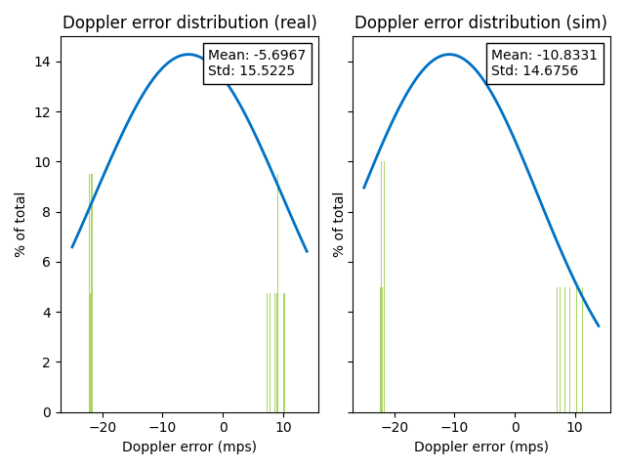
圖 11。場景 3 的多普勒誤差直方圖
我們在所有測試速度中都觀察到多普勒的相關性非常高。對于 10kph,真實分布和模擬分布在大約-3mps、-2mps 和 0mps 處都表現出相似的峰值。對于 40 英里/小時,峰值排列在-10mps 左右。80 公里/小時時,在-20mps 和 10mps 處觀察到峰值。當繪制多普勒與距離的關系圖時,進一步證明了這種高精度。
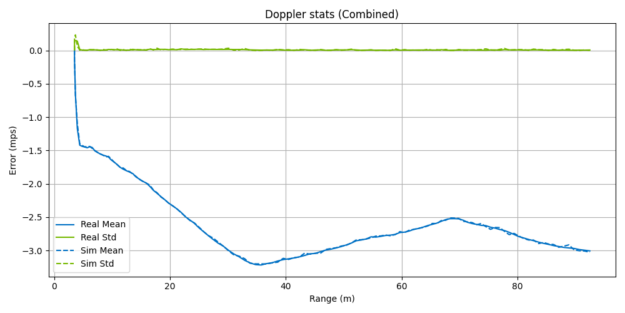
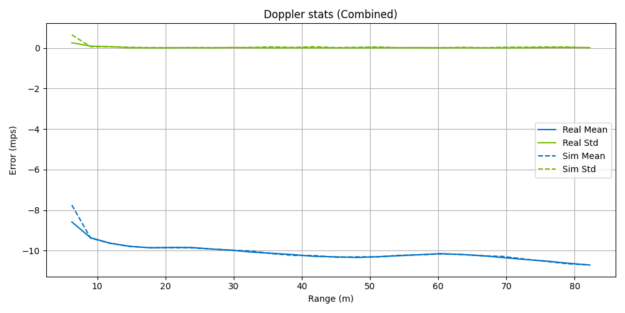
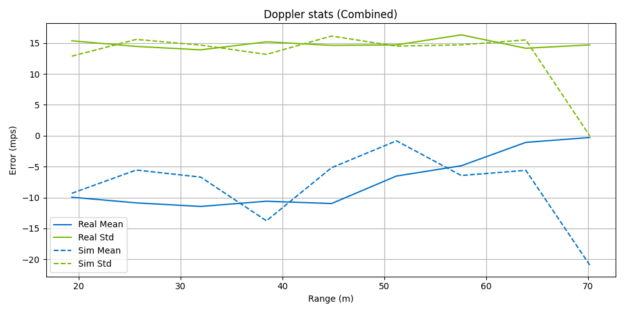
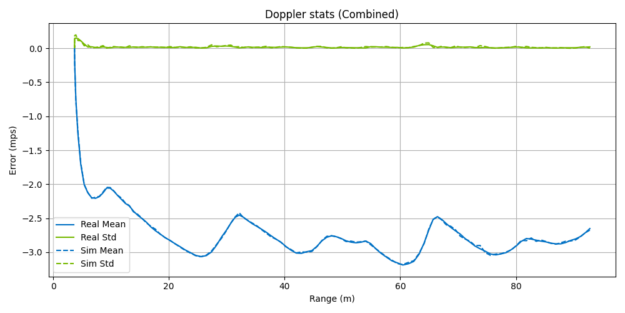
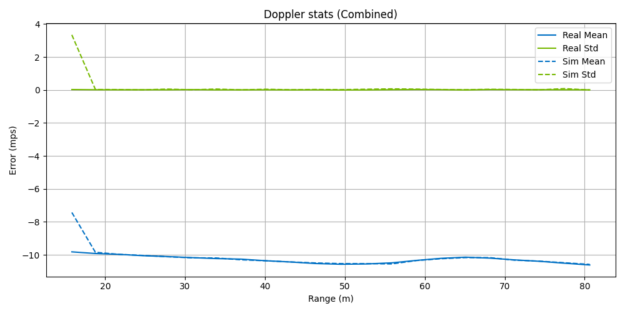
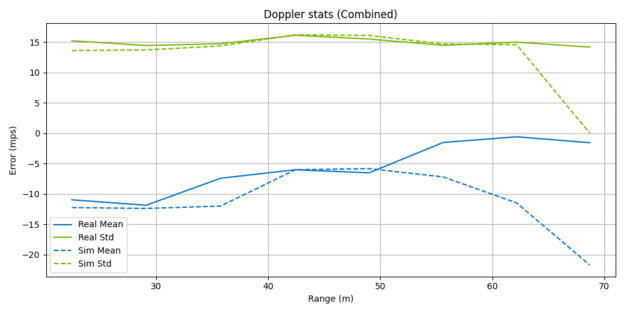
圖 12。場景 3 范圍內的多普勒平均 eror 和標準偏差
圖 13 顯示了高和低 RCS 角反射器位置和車輛速度下真實和模擬雷達探測的自上而下視圖。
真實的和模擬的多普勒測量結果都表明它們的平均值和標準偏差值基本一致。然而,我們注意到在較高速度時出現偏差。
我們將這些偏差歸因于數字孿生過程中的不確定性。ego 車輛的位置、速度和方向是在沒有差分 GPS 幫助的情況下使用激光雷達估計的。這些估計中的誤差在更高的速度下被放大,如 80 公里/小時所示。
此外,我們觀察到 DRIVE-Sim 能夠復制雷達混疊現象,當物體的徑向速度超過雷達的最大可測量無模糊速度時,就會出現這種現象,從而導致速度值不明確。真實世界的雷達在每個循環中都會微妙地改變最大可測量的無模糊速度范圍,從而使后續的感知算法能夠消除速度的歧義。
我們的模擬準確地復制了這種行為,正如真實數據和模擬數據中峰值的對齊所證明的那樣。特別是,在 80 公里/小時的速度下,真實雷達和模擬雷達都表現出相似的速度包裹。
結論
這項研究提供了我們的第一次迭代,用于使用真實世界的數據(包括靜態和動態條件)對我們的模擬雷達模型進行深入驗證。該分析旨在評估模型在各種性能指標上的保真度和準確性。
我們的結果表明,模擬雷達數據和真實世界雷達數據之間具有高度相關性,該模型能夠熟練地處理復雜的相互作用,如多盎司效應。
即將進行的實驗將側重于捕捉模擬真實世界場景的更復雜物體(車輛、行人、摩托車)的雷達數據。這些物體不僅具有更復雜的幾何形狀,而且由各種材料組成,從而在雷達波相互作用中引入了進一步的復雜性。通過這些努力,我們的目標是不斷提高模型的保真度,進一步彌合模擬與現實之間的差距。
通過在模擬場景中驗證準確的雷達傳感器行為,我們可以提高系統開發效率,減少對昂貴且耗時的真實世界數據收集的依賴,并提高 AV 系統的安全性和性能。
要了解更多信息,請參閱我們以前發布的帖子:
?