<xmp id="om0om">
<td id="om0om"></td>
<table id="om0om"><noscript id="om0om"></noscript></table>
DEVELOPER
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓
Search
Join
Cosmos
2025年 6月 16日
使用世界基礎模型生成的合成軌跡數據提高機器人學習效果
在機電一體化和機器人 AI 基礎模型的進步的推動下,通用型機器人技術已經問世。但關鍵的瓶頸依然存在:
2 MIN READ
使用世界基礎模型生成的合成軌跡數據提高機器人學習效果
2025年 6月 16日
Isaac Sim 和 Isaac Lab 現已推出早期開發者預覽版
NVIDIA 今天發布了 NVIDIA Isaac Sim 和 NVIDIA Isaac Lab 的開發者預覽版…
2 MIN READ
Isaac Sim 和 Isaac Lab 現已推出早期開發者預覽版
2025年 6月 11日
使用 NVIDIA Cosmos Predict-2 構建自定義物理人工智能基礎模型
構建更智能的機器人和自動駕駛汽車 (AV) 始于能夠理解現實世界動態的物理 AI 模型。這些模型發揮著兩個關鍵作用:
2 MIN READ
使用 NVIDIA Cosmos Predict-2 構建自定義物理人工智能基礎模型
2025年 6月 11日
借助神經重建和世界基礎模型提升自動駕駛汽車仿真速度
自動駕駛汽車 (AV) 堆棧正在從離散構建塊的層次結構發展為基于foundation models構建的端到端架構。
1 MIN READ
借助神經重建和世界基礎模型提升自動駕駛汽車仿真速度
2025年 6月 11日
借助全新 NVIDIA Cosmos 世界基礎模型簡化端到端自動駕駛汽車開發
隨著向為自動駕駛汽車 (AV) 提供動力支持的端到端規劃模型的轉變,人們對基于物理性質的高質量傳感器數據的需求也在不斷增加。
1 MIN READ
借助全新 NVIDIA Cosmos 世界基礎模型簡化端到端自動駕駛汽車開發
2025年 5月 30日
在阿里云 PAI 上一鍵部署和使用 NVIDIA Cosmos Reason-1 模型
NVIDIA 近期發布了 Cosmos Reason-1 的 7B 和 56B 兩款多模態大語言模型 (MLLM),它們經過了“物理 AI…
3 MIN READ
在阿里云 PAI 上一鍵部署和使用 NVIDIA Cosmos Reason-1 模型
2025年 5月 18日
利用 NVIDIA Cosmos Reason 整理合成數據集以訓練物理 AI 模型
AI 系統如何理解可能發生的事故與物理上不可能發生的事件之間的區別?還是計劃在邊緣場景中進行跨人類、物體和環境的多步驟交互?
2 MIN READ
利用 NVIDIA Cosmos Reason 整理合成數據集以訓練物理 AI 模型
2025年 5月 18日
NVIDIA Isaac Sim 和 NVIDIA Isaac Lab 即將新增高級傳感器物理特性、自定義和模型基準測試功能
在 COMPUTEX 2025 上,NVIDIA 宣布對其機器人仿真參考應用 NVIDIA Isaac Sim 和機器人學習框架…
3 MIN READ
NVIDIA Isaac Sim 和 NVIDIA Isaac Lab 即將新增高級傳感器物理特性、自定義和模型基準測試功能
2025年 3月 27日
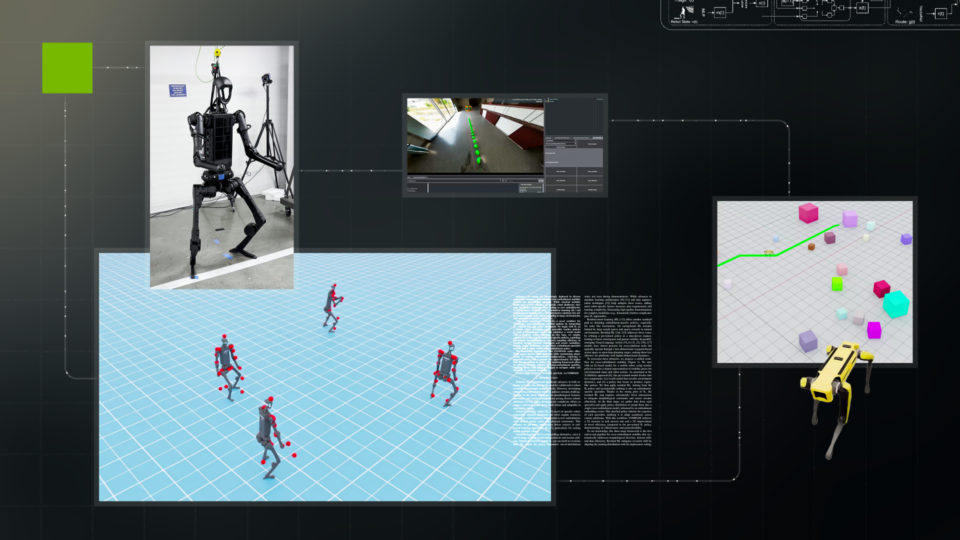
R2D2:利用 NVIDIA 研究中心的新型工作流和 AI 基礎模型,提升機器人的移動和全身控制能力
歡迎閱讀首期“NVIDIA 機器人研究與開發摘要(R²D²)”。
3 MIN READ
R2D2:利用 NVIDIA 研究中心的新型工作流和 AI 基礎模型,提升機器人的移動和全身控制能力
2025年 3月 18日
使用 NVIDIA Cosmos 世界基礎模型擴展合成數據和物理 AI 推理
人形機器人和自動駕駛汽車等新一代 AI 機器人依賴于高保真、物理感知的訓練數據 。如果沒有多樣化且具有代表性的數據集,
2 MIN READ
使用 NVIDIA Cosmos 世界基礎模型擴展合成數據和物理 AI 推理
加載更多
人人超碰97caoporen国产