高級倉庫每天處理數十萬份訂單。滿足這些數量需要大量的庫存、物理空間和復雜的工作流程,以支持高數量的揀選項目。
此外, Micro Fulfillment Center 越來越流行于填寫客戶的當天交貨訂單。
高效操作這些類型的先進設施和機械以及大量資源需要熟練工人。雖然勞動力正在減少,但投資于邊緣計算與人工智能會有所幫助。
勞動力萎縮
現代倉庫具有強大的自動化功能。自動機器和車輛在倉庫周圍移動產品,輸送機系統將貨物移動到集裝箱中,并使用提供拾取和排序系統的高級 3D 網格智能包裝產品。但即使在目前的自動化水平下,現代倉庫仍然是勞動密集型的。
如果包裝箱的尺寸不同,則自動包裝很困難,通常需要手動完成。有些物品又大又重,需要叉車和司機搬運。尋找和留住員工是一項挑戰,新冠病毒加劇了這一問題。在勞動力不斷減少的同時,倉儲業也在迅速發展。下一代倉庫需要專注于自動化才能成功。
先進工業的深度學習
深度學習和邊緣計算方面的進步提供了智能并自動化了更多的倉庫流程。自動化分揀和放置系統是高級倉庫正在實施的操作的一個例子。在拾取和放置系統中,自動機器在箱子中的其他對象中識別一個對象,然后選擇該對象并將其放置在其他地方進行打包。
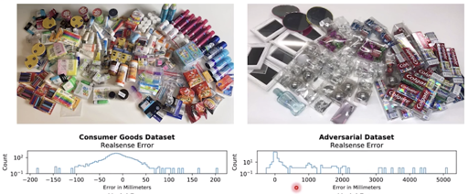
為了使這個系統自動化,需要許多不同的深度學習模型。這是因為有些物體很難用計算機視覺檢測,比如半透明、反光或非均勻物體。
下面的演練概述了如何將深度學習模型用于自動拾取和放置系統。
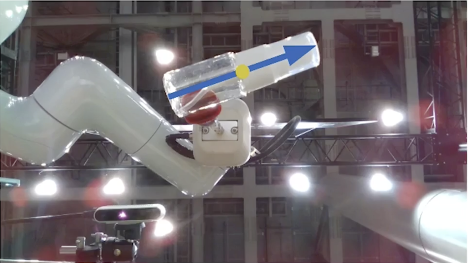
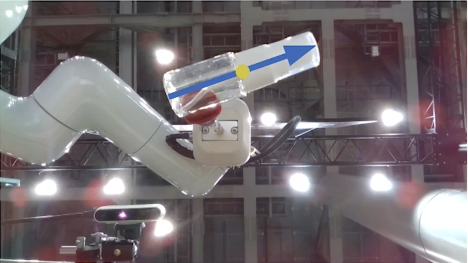
首先,需要確定對象抓取點。這是最簡單的深度學習模型,但也是自動化的一個重要功能。一旦知道在哪里抓取物體,就有必要了解物體在三維空間中是如何存在的。因此,需要一個深度估計模型,使拾取和放置系統能夠了解環境中對象的深度。
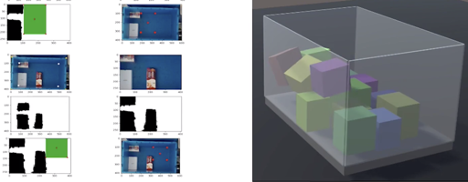
拾取對象后,需要放置該對象。為此,使用方向模型確定拾取的項目在空間中的位置。
結合這些型號和其他型號,可實現有效的箱子包裝。
揀放系統僅展示了零售商用于改進倉庫自動化的模型的一些示例。
要了解有關揀選和放置系統以及現代倉庫中涉及的其他模型的深入學習的更多信息,請查看機器人自動化和倉庫物流的深度學習.






