Posts by Gautham Sholingar

計算機視覺/視頻分析
2025年 6月 11日
借助神經重建和世界基礎模型提升自動駕駛汽車仿真速度
自動駕駛汽車 (AV) 堆棧正在從離散構建塊的層次結構發展為基于foundation models構建的端到端架構。
1 MIN READ
計算機視覺/視頻分析
2023年 11月 13日
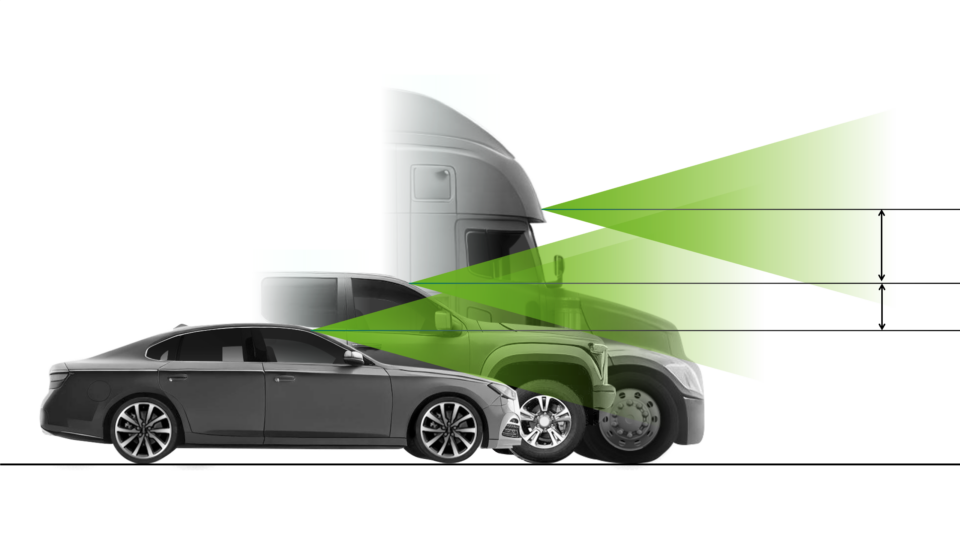
使用合成數據處理自動駕駛汽車感知
自動駕駛汽車 (AV) 有各種形狀和大小,從小型客車到多軸半掛卡車不等。但是,部署在這些車輛上的感知算法必須經過訓練,以處理類似情況,
2 MIN READ

數據中心/云端
2023年 5月 18日
利用合成數據聚焦遠場物體,實現基于攝像頭的 AV 感知
檢測遠場物體,如 100 米以外的車輛,是自動駕駛系統在高速公路上安全操作的基礎 在這樣的高速環境中,每一秒都很重要。因此,
2 MIN READ