物理 AI 模型使機器人能夠自主感知、解釋、推理現實世界并與之交互。加速計算和仿真是開發新一代機器人的關鍵。
物理學在機器人仿真中發揮著至關重要的作用,為在真實環境中準確虛擬呈現機器人行為和交互奠定了基礎。借助這些仿真器,研究人員和工程師可以安全、加速且經濟高效地訓練、開發、測試和驗證機器人控制算法和原型設計。
機器人仿真建立在基本的物理定律之上,包括質量和動量守恒、剛體和軟體動力學、接觸和摩擦以及執行器建模。這些原則用于預測機器人在各種場景和環境中的行為方式,例如在使用 GPU、DPU 或其他硬件加速器時的響應。
然而,仿真往往無法完全匹配現實,這一問題被稱為“仿真與現實(sim-to-real)的差距”。機器人開發者需要一個統一、可擴展且可定制的解決方案,既能模擬現實世界的物理特性,又能處理復雜行為(包括與自定義求解器的交互),并支持高可靠性等功能。
關于 Newton
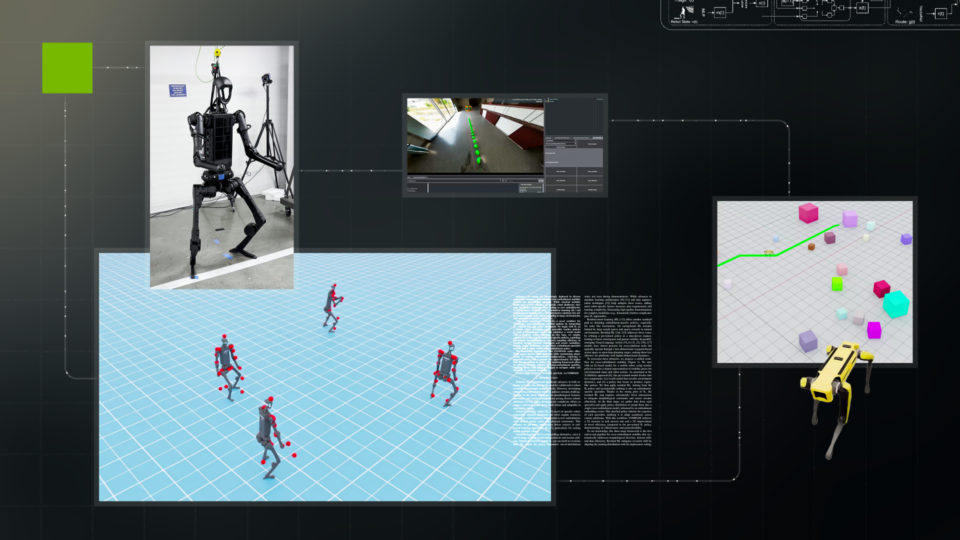
Newton 是由 NVIDIA、Google DeepMind 和 Disney Research 共同開發的一款開源、可擴展的物理引擎,旨在推動機器人學習和開發。
Newton 基于?NVIDIA Warp?構建,使機器人能夠以更高的精度學習處理復雜任務。Newton 與 MuJoCo Playground 或?NVIDIA Isaac Lab(用于機器人學習的開源統一框架)等學習框架兼容。
?

Newton 的關鍵特點包括:
開源
Newton 是開源的,為整個機器人社區提供了強大的支持。這使得機器人專家能夠自由地使用和分發該框架,并為其發展貢獻前沿研究成果。
NVIDIA 加速
Newton 基于NVIDIA Warp 構建,這是一個?NVIDIA CUDA-X 加速庫,使開發者能夠輕松編寫 GPU 加速、基于內核的程序,用于仿真 AI、機器人和機器學習 (ML)。利用 NVIDIA GPU 的并行處理能力,提供了一個高性能、靈活的框架,用于構建和運行基于物理的仿真。
由 MuJoCo-Warp 提供支持
這一計劃的一個關鍵方面是與 MuJoCo(Multi-Joint dynamics with Contact)的兼容性。MuJoCo 是一個廣泛用于機器人研究和開發的開源物理引擎,特別是在涉及復雜動力學和接觸豐富的環境中。開發人員可以利用現有的模型和代碼,節省時間和資源,以適應不同的物理引擎。
Google DeepMind 首次推出了由 Warp 加速的開源機器人仿真器 MuJoCo-Warp。它使開發人員能夠實現顯著的性能提升,人形機器人仿真的實現 70 倍以上的提速,手動操作任務實現 100 倍的提速。Mujoco-Warp 將作為 Newton 中的關鍵物理引擎,并通過 MuJoCo-Warp 提供。了解有關 Mujoco-Warp 的更多信息:https://github.com/google-deepmind/mujoco
可微物理
通過仿真傳播梯度的能力,為機器人仿真和學習開辟了新的可能性。可微仿真器可以生成前向模式的結果,并計算仿真結果的反向模式梯度,用于反向傳播以優化系統參數。
可擴展
隨著現代機器人技術范圍的擴大,仿真場景也隨之增加。Newton 具有高度可擴展性,能夠實現豐富的多物理場仿真,使機器人通過自定義求解器、積分器和數值方法與食品、布料以及其他可變形物體進行互動。
Newton 還支持將不同類型的求解器相結合,例如,Material Point Method (MPM)求解器與沙子與剛體動力學相結合。
基于 OpenUSD 構建
Newton 使用 OpenUSD 框架。OpenUSD 靈活的數據模型和合成引擎聚合了用于描述機器人及其周圍環境所需的數據,而自定義求解器和其他運行時可以針對特定的機器人能力和環境進行優化。
Disney Research 將率先使用 Newton 推動其機器人角色平臺發展,為下一代娛樂機器人提供支持。比如 GTC 主題演講中和黃仁勛一起登臺、以星球大戰為靈感設計的富有表現力的 BDX 機器人,就是該平臺的成果。
Walt Disney 想象工程研發部門高級副總裁 Kyle Laughlin 表示:“BDX 機器人只是一個開始。我們致力于以前所未有的方式,為更多角色賦予生命,而與 Disney Research、NVIDIA 和 Google DeepMind 的合作是實現這一愿景的關鍵。”
“此次合作將使我們能夠創造出比以往更具表現力、更具吸引力的新一代機器人角色,并以迪士尼獨有的方式與我們的游客建立聯系。”
除了 Newton 之外,Disney Research、Google DeepMind、Intrinsic 和 NVIDIA 正在合作定義用于機器人的 OpenUSD 資產結構。這種新的結構和數據管線使用 OpenUSD 內的最佳實踐來統一機器人工作流,并為所有數據源提供通用語言。
敬請關注
Newton 將為推動下一代人形機器人的發展鋪平道路。這項工作的開發工作正在進行中,并計劃在今年晚些時候推出第一個版本。
了解 Newton 背后技術的更多信息:
- NVIDIA Warp 是一個用于在 Python 中構建和加速數據生成以及空間計算的開發框架。
- NVIDIA Isaac Lab 基于?NVIDIA Isaac Sim?開發,是一個用于機器人學習的開源統一框架,旨在幫助訓練機器人策略。
開始使用
通過免費的?OpenUSD 課程鞏固您的基礎知識,并學習 OpenUSD 和機器人開發基礎課程:
https://www.nvidia.com/gtc/sessions/openusd/
?
?