Posts by Gautham Sholingar
Simulation / Modeling / Design
Jun 11, 2025
Accelerating AV Simulation with Neural Reconstruction and World Foundation Models
Autonomous vehicle (AV) stacks are evolving from a hierarchy of discrete building blocks to end-to-end architectures built on foundation models. This transition...
7 MIN READ
Simulation / Modeling / Design
Nov 13, 2023
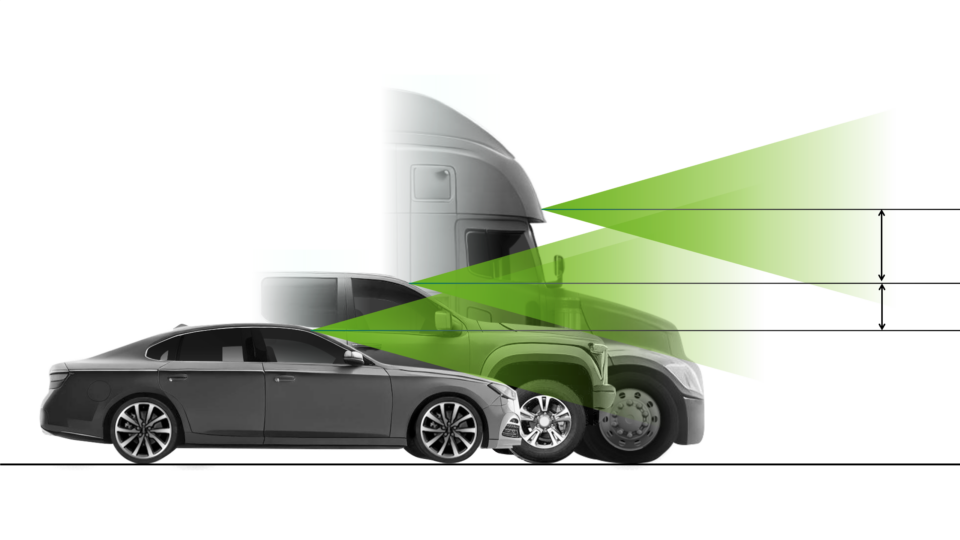
Using Synthetic Data to Address Novel Viewpoints for Autonomous Vehicle Perception
Autonomous vehicles (AV) come in all shapes and sizes, ranging from small passenger cars to multi-axle semi-trucks. However, a perception algorithm deployed on...
7 MIN READ

Simulation / Modeling / Design
May 18, 2023
Bringing Far-Field Objects into Focus with Synthetic Data for Camera-Based AV Perception
Detecting far-field objects, such as vehicles that are more than 100 m away, is fundamental for automated driving systems to maneuver safely while operating on...
7 MIN READ

